D-bus signaling performance
While working on lvm-dubstep the question was posed if D-bus could handle the number of changes that could happen in a short period of time, especially PropertiesChanged signals when a large number of logical volumes or physical volumes were present on the system (eg. 120K PVs and 10K+ LVs). To test this idea I put together a simple server and client which simply tries to send an arbitrary number of signals as fast as it possibly can. The number settled upon was 10K because during early testing I was running into time-out exceptions when trying to send more in a row. Initial testing was done using the dbus-python library and even though numbers seemed sufficient, people asked about sd-bus and sd-bus utilizing kdbus, so the experiment was expanded to include these as well. Source code for the testing is available here.
Test configuration
- One client listening for signals.
- Python tests were run on a Fedora 22 VM.
- Sd-bus was run on a similarly configured VM running Fedora 23 alpha utilizing systemd 222-2. Kdbus was built as a kernel module from the latest systemd/kdbus repo. F23 kernel version: 4.2.0-0.rc8.git0.1.fc23.x86_64.
- I tried running all the tests on the F23 VM, but the python tests were
failing horribly with journal entries:
Sep 01 10:53:14 sdbus systemd-bus-proxyd[663]: **Dropped messages due to queue overflow of local peer (pid: 2615 uid: 0)
The results:
- Python utilizing dbus-python library was able to send and receive 10K signals in a row, varying payload size from 32-128K without any issues. As I mentioned before if I try to send more than that in a row, especially at larger payload sizes I do get time-outs on the send.
- sd-bus without using kdbus I was only able to send up to 512 byte payloads before the server would error out with: Failed to emit signal: No buffer space available.
- sd-bus with kdbus the test completes, seemingly without error, but the number of signals received is not as expected and appears to vary with payload size.
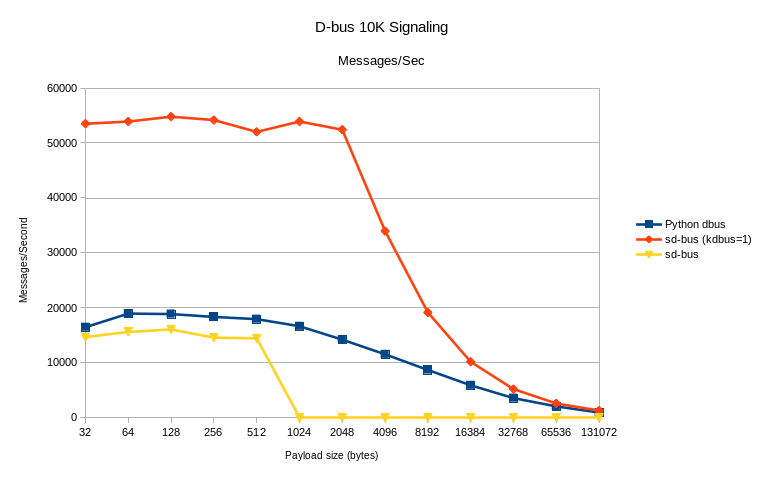
Messages/second is the total number of messages divided by the total time to receive them.
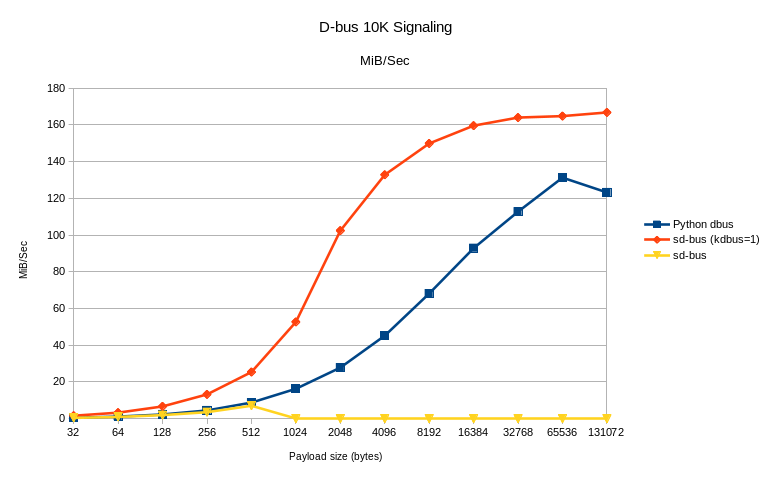
MiB/Second is the messages per second multiplied by the payload size.
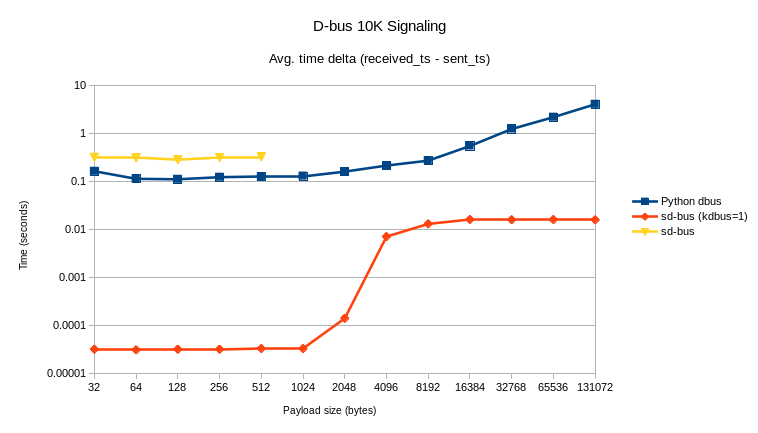
Average time delta is the time difference from when the signal was placed on the bus until is was read by the signal handler. This shows quite a bit of buffering for the python test case at larger payload sizes.
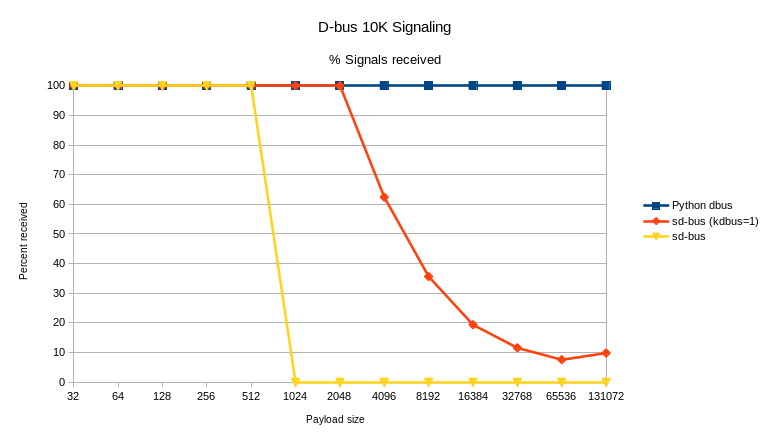
Percentage of signals that were received by the signal handler. As you can see once the payload > 2048, kdbus appears to silently discard signals away as nothing appeared in kernel output and the return codes were all good in user space.
Conclusions
- The C implementation using sd-bus without kdbus performs slightly poorer than the dbus-python which surprised me.
- kdbus is by far the best performing with payloads < 2048 bytes
- Signals are by definition sent without a response. Having a reliable way for the sender to know that a signal was not sent seems pretty important, so kdbus seems to have a bug in that no error was being returned to the transmitter or that there is a bug in my test code.
- Code likely has bugs and/or does something sub optimal, please do a pull request and I will incorporate the changes and re-run the tests.